-官方认证诚信至上 | 工业机器人及工控系统领军企业


NEWS
新闻资讯
高性能人形机器人关节模组选型的关键技术要素
发布时间:
2025-11-20 03:01:28
来源:
浏览量:226
【导语】人形机器人关节模组作为驱动与控制各关节的核心执行单元,性能关乎机器人整体表现。其选型受扭矩密度、控制精度、动态响应、能效、结构鲁棒性等关键技术因素影响。泰科机器人凭借深厚技术积累,其关节模组在这些方面表现优异,还能提供标准化与定制化方(fāng)案(àn),助(zhù)力(lì)人(rén)形机器人厂商加速产品开发。
人形机器人关节模组一般是集传动装置、驱动器、电机、抱闸、编码器以及力矩传感器等于一体的精密部件,负责驱动和控制人形机器人各个关节精确实现拟人化动作的核心执行单元,其性能直接决定了机器人的运动能力、效率与可靠性。人形机器人对关节模组提出了区别于传统工业机器人的苛刻要求,主要体现在高扭矩密度、精密控制、动态响应、能效比以及结构鲁棒性等方面。
 人形机器人本体
人形机器人本体以下技术因素是人形机器人关节模组选型的决定性依据:
1.扭矩密度:性能与轻量化的核心指标
扭矩密度是衡量关节模组单位质量输出扭矩能力的核心指标。人形机器人关节数量众多(当前先进设计可达16-60个自由度),关节模组的质量直接影响整机重量分布、惯性负载和能量消耗。更高的扭矩密度意味着在同等输出能力下拥有更轻的质量,从而显著降低整机自重、优化重心分布、提升动态响应速度,并延长电池续航能力,最终实现更高的有效载荷与整体运动性能。
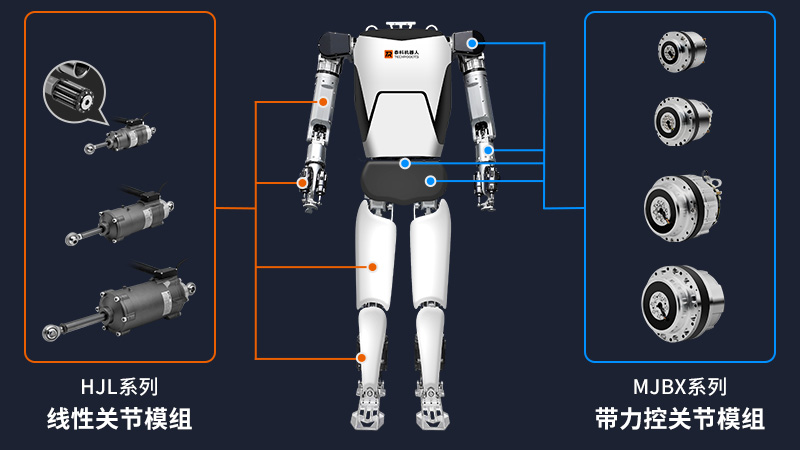
泰科机器人MJBX系列旋转关节模组集成扭矩传感器(可选),通过创新的谐波减速器结构设计实现轻量化且大扭矩(最小重量0.84kg),扭矩密度可达57.8 N·m/kg,并能让人形机器人的各关节都实时感知并控制力和力矩的大小。
HJL系列线性关节模组采用行星滚柱丝杠传动,以0.5kg质量输出600N推力,高推力型号(2.8kg)可达8000N推力,集成拉压力传感器,可适用于人形机器人腿部、手臂等重载部位,有效提升运动可靠性与抗扰动力。
 人形机器人线性关节
人形机器人线性关节2.位置与力矩控制精度:运动精确性的基石
关节模组的位置精度和力矩控制精度是实现人形机器人精准、平稳、协调运动的前提。每个关节的空间位姿由三维向量定义,关节模组的微小定位或力矩误差在多关节串联结构中会产生累积效应,导致末端执行器严重偏离目标轨迹(jī)或姿态失稳(如步态中的髋-膝-踝联动偏差)。高精度控制依赖于高分辨率编码器、高性能伺服驱动器算法、低背隙减速器以及高(gāo)极(jí)对(duì)数电机。
泰科机器人MJBX系列关节模组集成扭矩传感器,能够实时精准捕捉关节受力数据,比如抓取重量、碰撞反作用力等,为人形机器人提供“力感知”基础。可实现全关节力感知覆盖,机身任何部位被触碰,均可(kě)通(tōng)过(guò)关节扭矩传感器反馈力信号。这对于实现类人的自然流畅运动,如柔顺交互、精细操作至关重要。
 带力控关节模组
带力控关节模组3.动态响应与过载能力:应对复杂环境的关键
动态响应指关节模组对控制指令变化的快速跟随能力,通常由带宽和阶跃响应时间衡量。过载能力即最大瞬时转矩,是模组在短时间内(毫秒级)可输出的远超额定值的扭矩。人形机器人在非结构化环境中,如地面塌陷、意外碰撞需具备快速调整姿态的能力,这要求关节模组能在极短时间内爆发高扭矩,例如紧急调整落足点,并快速稳定运行。
该特性依赖(lài)于电机的高功率密度设计、驱动器瞬时电流输出能力以及传动机构的刚性。泰科机器人关节模组的设计考虑了此类动态需求,确保在(zài)突(tū)发(fā)状(zhuàng)况下能(néng)提(tí)供(gōng)必(bì)要(yào)的(de)瞬(shùn)时(shí)高(gāo)扭(niǔ)矩(ju)输(shū)出(chū)。
4.能(néng)效(xiào)与(yǔ)热(rè)管(guǎn)理(lǐ):续(xù)航(háng)与(yǔ)可(kě)靠(kào)运(yùn)行(xíng)的(de)保(bǎo)障(zhàng)
能(néng)效(xiào)衡(héng)量(liàng)输(shū)入(rù)电(diàn)能(néng)转(zhuǎn)化(huà)为(wèi)有(yǒu)效(xiào)机(jī)械(xiè)功(gōng)的(de)比(bǐ)例(lì),损(sǔn)耗(hào)部(bù)分(fēn)主要(yào)转(zhuǎn)化(huà)为(wèi)热(rè)量(liàng)。高能效意味着更少的能量浪费和发热,直接延长由电池供电的人形机器人的单次作业时间。热管理能力则决定了模组在持续工作或高负载下的温升控(kòng)制(zhì)水(shuǐ)平(píng),过(guò)热(rè)会(huì)触(chù)发(fā)保(bǎo)护(hù)、降(jiàng)低(dī)性(xìng)能(néng)甚(shén)至(zhì)损(sǔn)坏(huài)器(qì)件(jiàn)。
泰(tài)科(kē)机(jī)器(qì)人(rén)关节(jié)模(mó)组(zǔ)通(tōng)过(guò)精(jīng)巧(qiǎo)的(de)结(jié)构(gòu)设(shè)计(jì),如(rú)轻(qīng)量(liàng)化(huà)减(jiǎn)少(shǎo)惯(guàn)性(xìng)负(fù)载(zài)、优(yōu)化(huà)电(diàn)磁(cí)设(shè)计(jì)和(hé)采用(yòng)高(gāo)效(xiào)率(lǜ)组(zǔ)件(jiàn)(如(rú)自(zì)主研(yán)制(zhì)的(de)伺(cì)服(fú)驱(qū)动(dòng)器(qì)效(xiào)率(lǜ)可(kě)达(dá)95%以(yǐ)上(shàng)),提(tí)升(shēng)整(zhěng)体(tǐ)能(néng)效(xiào)。同(tóng)时(shí),其(qí)设(shè)计(jì)强(qiáng)调(diào)高(gāo)效(xiào)导(dǎo)热(rè)路径和(hé)热(rè)管(guǎn)理(lǐ)方(fāng)案(àn),确(què)保(bǎo)良(liáng)好(hǎo)的(de)温(wēn)控(kòng),保(bǎo)障(zhàng)长(zhǎng)时(shí)间(jiān)高(gāo)负(fù)荷(hé)运(yùn)行(xíng)的(de)稳(wěn)定(dìng)性(xìng),这(zhè)对(duì)于(yú)实(shí)际(jì)应用场景的连续作业能力至关重要。
5.结构鲁棒性与可靠性:确保长期稳定运行
结构鲁棒性指模组抵抗机械冲击、振动、跌落等意外工况的能力。可靠性则体现在长寿命、免维护(或低维护)设计和(hé)耐(nài)受恶劣环境的能力。人形机器人在开发测试及实际应用,如工业搬运、野外巡检中面临跌倒、碰撞、负载突变等风险,关节模组作为核心运动部件必须具备极高的机械坚固性和环境耐受性。
泰科机器人关节模组的设计强调坚固性,采用高质量材料和强化结构,以承受跌落测试、重物举升、突发冲击等苛刻条件,确保持续可靠的运行,降低维护需求,保障整体功能性的实现。
标准化模组与定制化解决方案的权衡
人形机器人厂商的核心竞争力常聚焦于AI算法与软件系统,而开发和生产高性能、高集成(chéng)度(dù)的(de)关节(jié)模(mó)组(zǔ)是一项高度复杂的系统工程。而寻求机器人硬件(特别是关节模组)领域拥有深厚技术积累和正向设计能力的合作伙伴(如泰科机器人),可以提供成熟可靠的标准化或定制化关节模组解决方案,可显著加速产品开发进程,使客户能更专注于其核心优势领域,在当前的具身智能产业化竞赛中赢得时间优势。泰科机器人凭借多年在机器人本体及关节模组的定制开发经验,可为客户提供此类关键技术支持。
ONLINE MESSAGE
在线留言
*注:请务必信息填写准确,并保持通讯畅通,我们会尽快与你取得联系


上海智能机器人科技股份有限公司
Shanghai United Intelligence Robotics Inc.
产品咨询: sale@jinnian.com
其他业务: service@jinnian.com
销售热线:400-65738829-8071
邮寄地址:上海市浦东新区申迪南路80号5楼
一 子公司 一
智能机器人(浙江)有限公司
United Intelligence Robotics (Zhejiang) Co.,Ltd
电子邮箱: e-mail@jinnian.com
业务咨询: contact@jinnian.com
销售热线:0755-25836555
万维网址: www.ybgsyj.com
邮寄地址: 浙江省杭州市滨江区长河街道网商路586号6幢3层

扫码手机查看