-官方认证诚信至上 | 工业机器人及工控系统领军企业


NEWS
新闻资讯
2025 CeMAT 亚洲国际物流展| 经世智能携手SRT展出智慧实验室解决方案
发布时间:
2025-11-01 06:31:22
来源:
浏览量:241
【导语】2025年10月28日,2025 CeMAT亚洲国际物流展在上海启幕,经世智能携手SRT于N2馆C5-4展位亮相,联合展出智慧实验室行业解决方案。其复合机器人搭载SRT柔性夹(jiā)爪(zhǎo),以(yǐ)超(chāo)高(gāo)精(jīng)度(dù)控(kòng)制(zhì)与(yǔ)仿(fǎng)生(shēng)柔(róu)性(xìng)抓(zhuā)取(qǔ)技(jì)术(shù)革(gé)新(xīn)行(xíng)业(yè),为(wèi)生(shēng)物(wù)医(yī)药(yào)等(děng)场(chǎng)景(jǐng)提(tí)供(gōng)全栈(zhàn)式(shì)自(zì)动(dòng)化(huà)方(fāng)案(àn),尽(jǐn)显(xiǎn)在(zài)移(yí)动(dòng)复(fù)合(hé)机(jī)器(qì)人(rén)及(jí)数(shù)字(zì)孪(luán)生(shēng)领(lǐng)域的(de)深(shēn)厚(hòu)实(shí)力(lì) 。
2025年(nián)10月28日,为期四天的2025 CeMAT 亚洲国际物流技术与运输系统展览会在上海新国际博览中心盛大启幕!
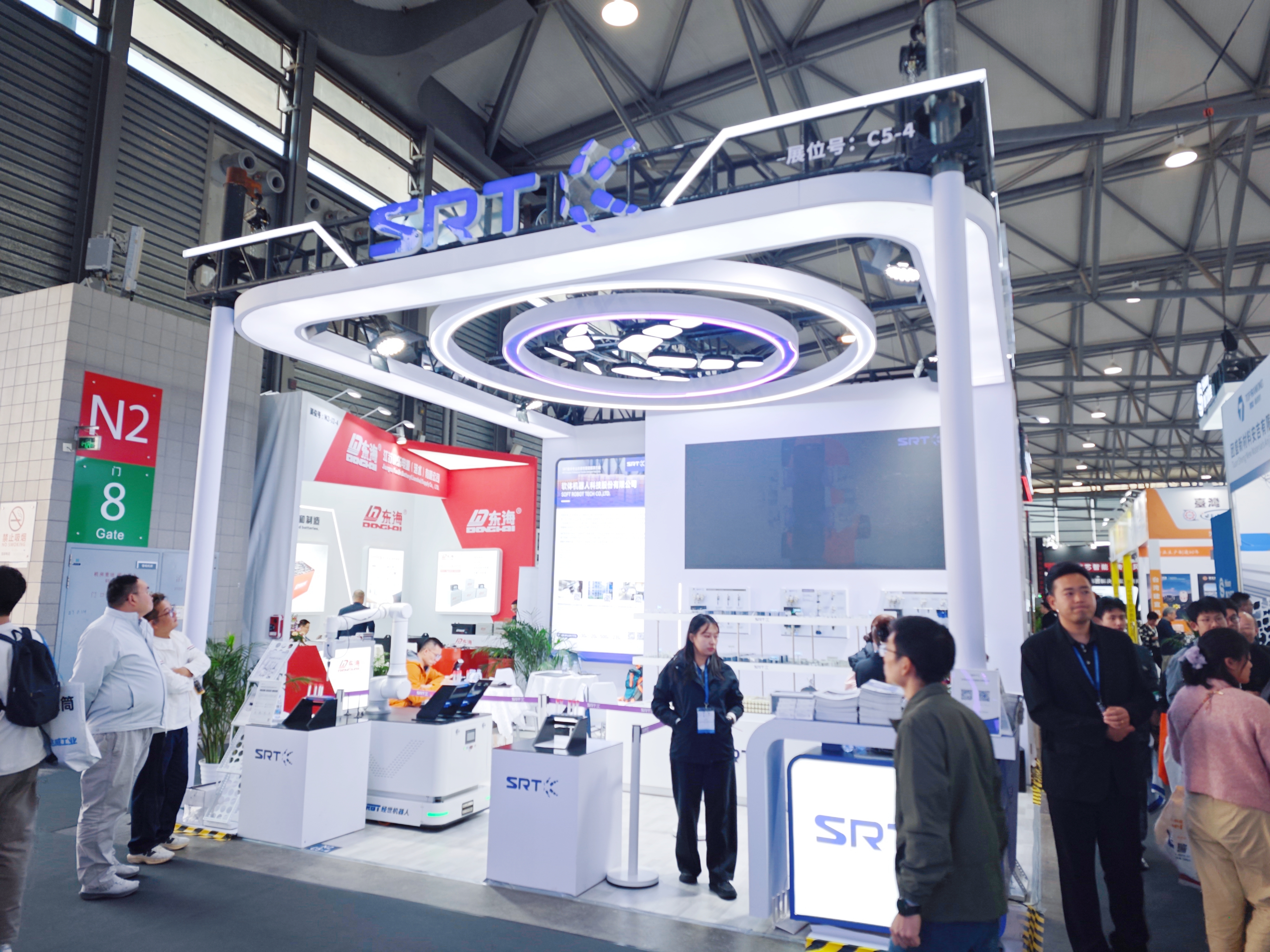
经世智能携手SRT亮相N2馆C5-4展位,联合展出了智慧实验室行业解决方案!
在展台现场,经世智能复合机器人机械臂末端搭载SRT柔性夹爪,动态演示了实验室试管样本的精准转运与上下料流程。该方案通过两大核心技术实现行业革新:
±0.5mm超高精度控制
依托经世智能复合机器人一体化控制技术及车身姿态动态补偿技术,无视觉引导直接抓取情况下,复合机器人可实现综合重复定位精度±0.5mm,达到行业领先水平,确保试管样本的精准、稳定抓取。
仿生柔性抓取适配
SRT柔性夹爪采用仿生学设计,实现对不同规格试管的无损抓取,解决了玻璃器皿易碎、形状差异大的行业痛点。
此次联合参展是经世智能与SRT在智慧实验室赛道的首次战略联动,为生物医药、检验检测等场景提供了“刚柔并济”的全栈式自动化解决方案!

✦
智慧实验室行业解决方案
复合机器人样本转运及上下料
✦
复合机器人在智慧实验室行业主要应用于实验样本自动化转运、高通量实验流程衔接、危险物料与废弃物处理等环节,通过“AGV移动底盘+协作机械臂”一体化控制方案实现高效自动化作业。

应用场景
实验样本自动化转运:可自主完成试管、培养皿等实验材料的精准抓取与跨区域转运。如生物实验室中,机器人将样本从存储区运送至检测仪器。
高通量实验流程衔接:在药物筛选或基因测序等需要连续操作的场景中,机器人可实现多步骤实验流程的自动化衔接。如自动抓取试管进行分液、离心后转运至下一检测环节。
危险物料与废弃物处理:针对有毒、放射性或感染性样本,复合机器人可替代人工完成封闭环境内的转运和封装,降低人员暴露风险。
精密仪器上下料操作:在分析仪器的样本加载环节,机器人通过视觉定位和柔性夹爪,精准完成试管开盖、放置和回收操作,避免人为误差。
核心价值
24H作业,转运效率提升30%以上,设备稼动率提升20%
模块化设计及动态路径规划,适配多批次生产需求,加速产线切换
减少70%重复人力,废品率降低6%
高精度操作与洁净控制提升良率
END
经世专注于移动复合机器人及数字孪生技术研发与应用。
总公司山东经世智能科技有限公司,成立于2018年,总部坐落于美丽的海滨城市山东烟台,是一家专注于移动复合机器人、数字孪生技术研发与应用的国家级高新技术企业、山东省“专精特新”企业、山东省瞪羚企业。依托自主研发的具身智能软硬件技术平台,形成了智造仿真、工业互联、智能调度控制、移动复合机器人四大系列应用产品,并在智能制造、智能仓储、智能物流、科研教育等多个领域具备成熟的解决方案规划落地能力和丰富的项目实施经验(yàn)。
山东经世机器人有限公司作为经世智能全资子公司,专注于移动复合机器人技术(shù)研(yán)发(fā)与(yǔ)应(yīng)用(yòng),致(zhì)力(lì)于(yú)打(dǎ)通(tōng)生(shēng)产(chǎn)物(wù)流(liú)最(zuì)后(hòu)“一(yī)公(gōng)里(lǐ)”,提(tí)供(gōng)多(duō)工(gōng)位(wèi)柔(róu)性(xìng)上(shàng)下(xià)料(liào)解(jiě)决(jué)方(fāng)案(àn)。经(jīng)世(shì)机(jī)器(qì)人(rén)创(chuàng)新(xīn)突(tū)破(pò)复(fù)合(hé)机(jī)器人车身姿态动态补偿技术,自主研发复合机器人一体化控制系统和MCR-Master复合机器人操作系统,支持各类场景下的移动机器人应用,产品品类覆盖复合机器人、移动机器人、仓储机器人、机器人操作系统,广泛应用于3C电子、半导体、CNC、智慧档案室、智慧实验室等领域。
ONLINE MESSAGE
在线留言
*注:请务必信息填写准确,并保持通讯畅通,我们会尽快与你取得联系


上海智能机器人科技股份有限公司
Shanghai United Intelligence Robotics Inc.
产品咨询: sale@jinnian.com
其他业务: service@jinnian.com
销售热线:400-65738829-8071
邮寄地址:上海市浦东新区申迪南路80号5楼
一 子公司 一
智能机器人(浙江)有限公司
United Intelligence Robotics (Zhejiang) Co.,Ltd
电子邮箱: e-mail@jinnian.com
业务咨询: contact@jinnian.com
销售热线:0755-25836555
万维网址: www.ybgsyj.com
邮寄地址: 浙江省杭州市滨江区长河街道网商路586号6幢3层

扫码手机查看