-官方认证诚信至上 | 工业机器人及工控系统领军企业


NEWS
新闻资讯
德州仪器加速激光雷达在机器人中的应用
发布时间:
2025-08-16 12:01:16
来源:
浏览量:319
【导语】激光雷达技术正逐步革新机器人与自主系统的感知与运行能力。尽管这项技术已历经数十年发展,但其在机器人领域的广泛应用却是近年来的成果。从自主移动机器人(AMR)到商用车辆,激光雷达以其卓越的感知精度和实时反应能力,为各类自主系统提供了强大的安全保障。本文将深入探讨激光雷达在机器人领域的应用优势、技术分类及其在复杂环境中的表现,同时展望其未来的发展前景(jǐng)。
激光雷达技术正持续提升机器人与自主系统在各种环境中的感知、反应和安全运行水平。这项技术虽已有数十年历史,但近年来的发展才(cái)使(shǐ)激(jī)光(guāng)雷(léi)达(dá)成(chéng)功(gōng)应(yīng)用(yòng)于(yú)机(jī)器(qì)人(rén)领(lǐng)域,例(lì)如(rú)图(tú)所(suǒ)示(shì)的(de)自(zì)主移(yí)动(dòng)机(jī)器(qì)人(rén) (AMR)。
某(mǒu)热(rè)门(mén)电(diàn)影(yǐng)系(xì)列(liè)中(zhōng),机(jī)器(qì)人(rén)能(néng)从(cóng)汽(qì)车(chē)变(biàn)形(xíng)成(chéng)具(jù)备(bèi)人(rén)类(lèi)性(xìng)格(gé)的(de)全功(gōng)能(néng)机器人。现实中,如今的机器人尚未拥有这种感知能力,其需要摄像头充当“眼睛”来应对充满未知障碍的环境。
在汽车领域,我们不难理解为何采用所有可能的导航方法(而不仅仅是摄像头)有利于确保车辆、乘客和行人的安全。借助一套称为“传感器融合”的检测模块,可让激光雷达、雷达和摄像头等导航方法并行工作,从而实现距离和速度测量。传感器融合可使车辆以精准视角观察周围环境中的障碍物。
因此,在机器人领域,激光雷达技术的进步将推动 AMR 在各种场景中的广泛应用,提供更强的环境感知能力、障碍(ài)物(wù)探(tàn)测(cè)能(néng)力(lì)和(hé)实(shí)时(shí)反(fǎn)应(yīng)能(néng)力(lì),同(tóng)时(shí)克(kè)服(fú)基(jī)于(yú)摄(shè)像(xiàng)头(tóu)的(de)传(chuán)统(tǒng)系(xì)统(tǒng)的(de)局(jú)限(xiàn)性(xìng)。
汽(qì)车(chē)激(jī)光(guāng)雷(léi)达(dá)与(yǔ)工(gōng)业(yè)激(jī)光(guāng)雷(léi)达(dá)
在(zài)商(shāng)用(yòng)车(chē)辆上,可在车顶或底盘侧面发现机械扫描激光雷达。激光雷达模块的大小与冰球差不多,单个模块往往配备 32 至 128 个通道,移动速度极快,平均 0.2 秒就能旋转 360 度。采用光学飞行时间 (ToF) 架构和基于模数转换器 (ADC) 的系统,每个模块能够在每个通道获取更多信息,但代价是更高的功耗和更大的尺寸。
配备 ADC 的激光雷达模块通常被称为3D 或 4D 设计,具体取决于其能够创建三维还是四维信息点云的能力。
工业激光雷达虽然具有相同的技术基础,但每个模块的通道数通常较少,有时甚至只有一个通道。由于降低了复杂性和尺寸,工业模块的成本和功耗通常都更低,且更易集成到机器人设计中。根据其生成二维点云或单维距离测量的能力,工业激光雷达系统可分为二维或单维类型。
工业激光雷达的应用包括交通监控、港口和枢纽监控、配送仓库导航和监控、AMR、自动驾驶工业车辆,以及智能手机和平板电脑等个人电子产品。
激光雷达对机器人有何好处?
随着 AMR 进入新的领域,且行动比以往都更加独立,仅靠摄像头可能已难以满足需求。想象一下,一(yī)辆(liàng) AMR 送(sòng)货(huò)车(chē)正(zhèng)在(zài)街(jiē)区(qū)的(de)人(rén)行(xíng)道(dào)上(shàng)行(xíng)驶(shǐ)。即(jí)便(biàn)是人行道区域,也可能出现汽车、垃圾桶、行人、自行车或儿童玩具等各类障碍物,这些都会影响机器人的导航能力。
AMR 必须检测到这些障碍物,评估潜在影响,并实时做出相应反应,这一点至关重要。添加激光雷达模块可提供必要的分辨率和响应时间,从而使AMR 能够感知环境变化(如滚入路径的球),从而快速反应并避(bì)免(miǎn)碰(pèng)撞(zhuàng)。演(yǎn)示(shì)了(le)一(yī)个(gè)配(pèi)有(yǒu)激(jī)光(guāng)雷(léi)达(dá)的(de) AMR 在(zài)拥(yōng)挤(jǐ)的(de)人(rén)行(xíng)道(dào)上(shàng)移(yí)动(dòng)。
尽(jǐn)管(guǎn)摄(shè)像(xiàng)头(tóu)能(néng)提(tí)供(gōng)高(gāo)分(fēn)辨(biàn)率(lǜ)图(tú)像(xiàng),但(dàn)其(qí)在(zài)精(jīng)确(què)测(cè)距(jù)方(fāng)面(miàn)存(cún)在(zài)局(jú)限(xiàn),而(ér)这(zhè)恰(qià)恰(qià)是(shì)判断 AMR 应继续行进还是调整路线的关键依据。
此外,AMR 需确保在各种光照和天气条件下正常工作。激光雷达技术既不受这些环境因素制约,也无需外部光源(而这正是基于摄像头的系统的限制因素)。
加速激光雷达在机器人中的应用
随着激光雷达的发展前景越来越明朗,设计工程师必须选择合适的方法来将这种先进的感应技术集成到系统中。首先,必须为激光雷达光学设计中的发射路径设计激光驱动电路,并为接收路径配置跨阻放大器 (TIA),如图所示。可选方案包括在光电二极管和时间数字转换器之间为具有 TIA(如 LMH34400)的接收信号链实现单芯片设计,或选用TLV3801等高速比较器进行设计配对。
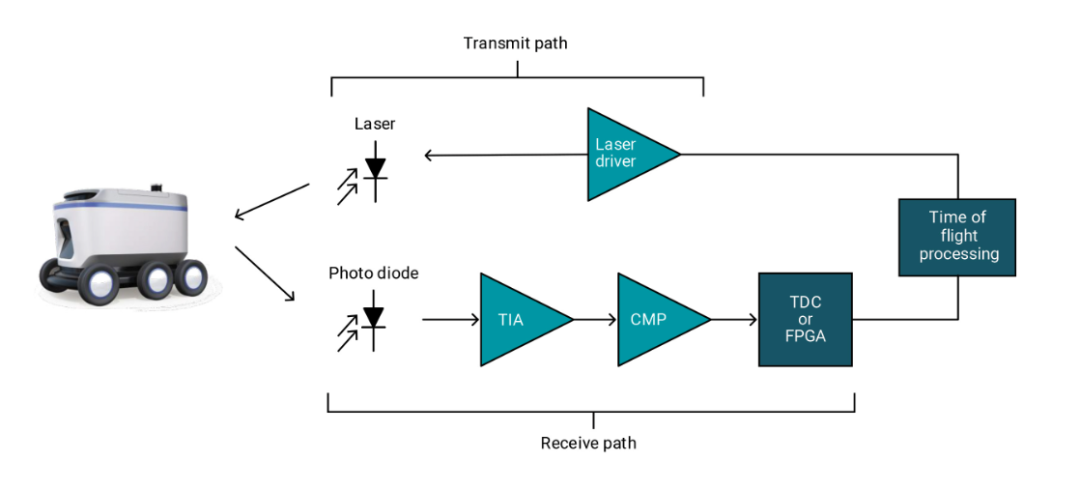
图 :激光雷达光学信号链方框图
在设计传输路径时,LMH13000集成激光驱动器可在两种操作模式(连续和脉冲)下提供高输出电流驱动,从而最大限度地减少对额外分立元件的需求。这款低电压差分信号控制电流源可实现 2% 的脉冲温度变化,上升和下降时间为 800ps,频率高达 250MHz。LMH13000作为脉冲电流源工作时,可支持 50mA 至 5A 的输出电流。
窄脉冲(chōng)和(hé)高(gāo)输(shū)出(chū)电(diàn)流(liú)驱(qū)动(dòng)相(xiāng)结(jié)合(hé),可(kě)产(chǎn)生(shēng)更(gèng)高(gāo)功(gōng)率(lǜ)的脉冲,从而使测量距离延长多达30%,同时仍能确保符合人眼安全标准。借助改进(jìn)的功能,机器人可更快、更准确地检测障碍物,从而改善实时决策并在复杂环境中实现更安全的导航。
结语
在汽车和工业车辆中,激光雷达都是实现移动自主性的核心一环。实时进行物体探测和避免碰撞可提高车辆和人员的安全性。那些在电影中穿梭于日常环境的逼真的移动机器人,也许并不像我们想象的那样遥不可及。
ONLINE MESSAGE
在线留言
*注:请务必信息填写准确,并保持通讯畅通,我们会尽快与你取得联系


上海智能机器人科技股份有限公司
Shanghai United Intelligence Robotics Inc.
产品咨询: sale@jinnian.com
其他业务: service@jinnian.com
销售热线:400-65738829-8071
邮寄地址:上海市浦东新区申迪南路80号5楼
一 子公司 一
智能机器人(浙江)有限公司
United Intelligence Robotics (Zhejiang) Co.,Ltd
电子邮箱: e-mail@jinnian.com
业务咨询: contact@jinnian.com
销售热线:0755-25836555
万维网址: www.ybgsyj.com
邮寄地址: 浙江省杭州市滨江区长河街道网商路586号6幢3层

扫码手机查看